Welcome to the Drones Lab
We are a dynamic research group at the Department of Computer Science and Engineering.



Recent Publications
-
 Edge-SLAM: Edge-Assisted Visual Simultaneous Localization and Mapping
Edge-SLAM: Edge-Assisted Visual Simultaneous Localization and Mapping
Ali J. Ben Ali , Sofiya Semenova , Marziye Kouroshli , Karthik Dantu
ACM Transactions on Embedded Computing Systems, 2022 , pp. 1–31
Project Page | PDF| Bibtex -
 Understanding Bounding Functions in Safety-Critical UAV Software
Understanding Bounding Functions in Safety-Critical UAV Software
Xiaozhou Liang , John Henry Burns , Joseph Sanchez , Karthik Dantu , Lukasz Ziarek , Yu David Liu
Proceedings of the 43rd International Conference on Software Engineering, 2021 , pp.
Paper (ICSE 2021) | PDF| Bibtex -
Edge-SLAM: Edge-Assisted Visual Simultaneous Localization and Mapping
Ali J. Ben Ali , Zakieh Hashemifar , Karthik Dantu
Proceedings of the 18th International Conference on Mobile Systems, Applications, and Services, 2020 , pp. 325–337
Project Page | PDF| Bibtex -
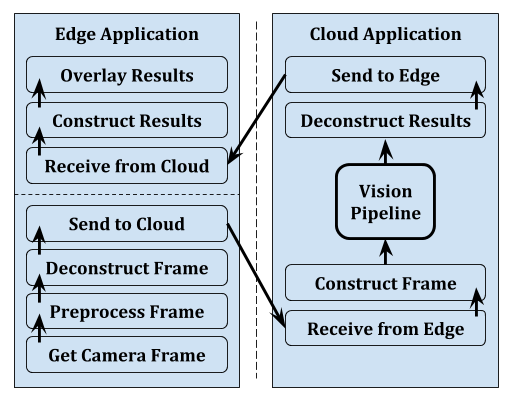 Platform Variability in Edge-Cloud Vision Systems
Platform Variability in Edge-Cloud Vision Systems
Ali J. Ben Ali , Sofiya Semenova , Karthik Dantu
International Workshop on Mobile Computing Systems and Applications (HotMobile), 2019 , pp. 163
Poster (HotMobile 2019) | PDF| Bibtex -
 WISDOM: WIreless Sensing-Assisted Distributed Online Mapping
WISDOM: WIreless Sensing-Assisted Distributed Online Mapping
Charuvahan Adhivarahan , Karthik Dantu
International Conference on Robotics and Automation (ICRA), 2019 , pp. 8026–8033
Video | Project Page | PDF| Bibtex
Projects

|
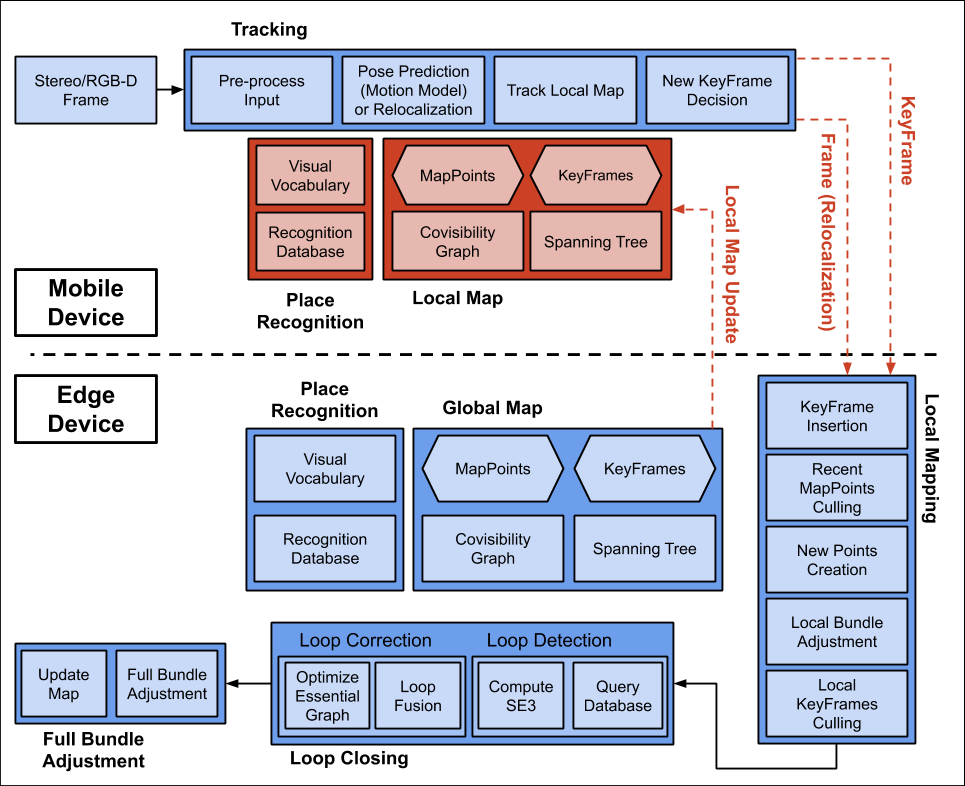
Edge-SLAM
Edge-SLAM is an edge-assisted visual simultaneous localization and mapping. Edge-SLAM adapts Visual-SLAM into edge computing architecture to enable long operation of Visual-SLAM on mobile devices. This is achieved by offloading the computation-intensive modules to the edge. Thus, Edge-SLAM reduces resource usage on the mobile device and keeps it constant. Edge-SLAM is implemented on top of ORB-SLAM2 and is publicly available on GitHub.
|
|---|

|
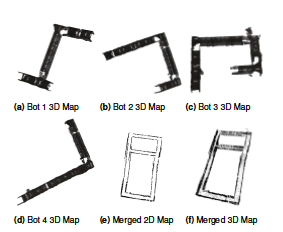
WISDOM: WIreless Sensing-assisted Distributed Online Mapping
Use wireless access points and a modified ICP algorithm to efficiently merge visual 2D and 3D maps of indoor environments from multiple robots. Received signal strength values from multiple Access Points are used to find a coarse transformation between the robots.
|
|---|
|
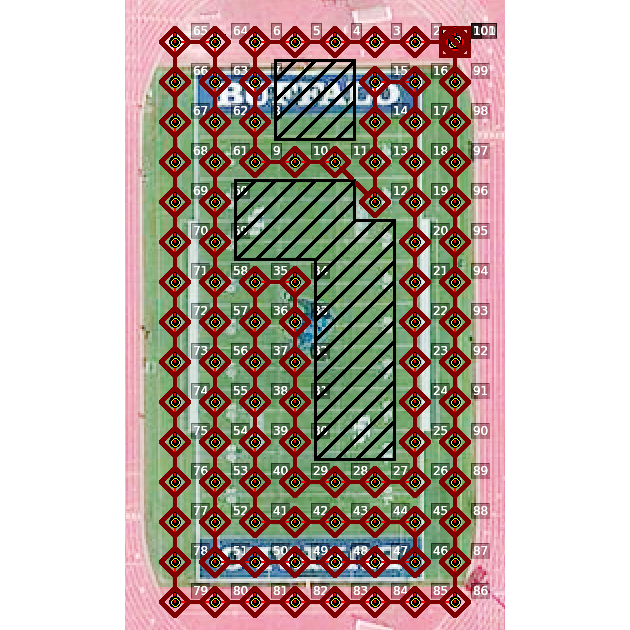
Minimum Energy Coverage Path Planning for UAVs
A new algorithm for coverage path planning (CPP) problem for unmanned aerial vehicles (UAV), based on minimizing total energy consumed during flight.
|
|---|
News
November, 2 2022
- Classification model submission ranked at Fifth place (UBPercept) in ACM/IEEE TinyML Design Contest at the 2022 International Conference on Computer-Aided Design (ICCAD) [Link]
October, 29 2022
- 'Piezo-cantilever Sensor for Real-time Monitoring of 8 Greenhouse Gasses with LoRa Communication' finished at 2nd place in The Keysight Innovation Challenge 2022 [Link]
August, 13 2022
- Paper Accepted in ACM Transactions on Embedded Computing Systems: 'Edge-SLAM: Edge-Assisted Visual Simultaneous Localization and Mapping' [Link]
July, 14 2022
- Object detection model submission ranked at Fourth place (UBPercept) in Design Automation Conference - System Design Contest 2022 [Link]
August, 1 2022
- Lab website is out!