Projects
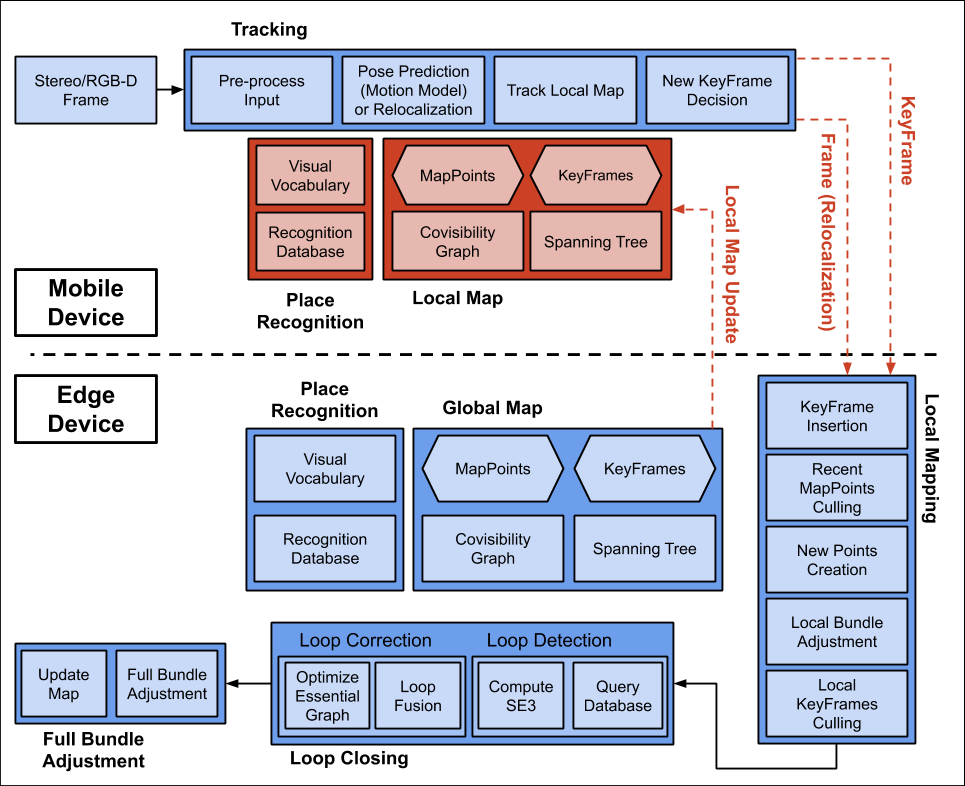
Edge-SLAM is an edge-assisted visual simultaneous localization and mapping. Edge-SLAM adapts Visual-SLAM into edge computing architecture to enable long operation of Visual-SLAM on mobile devices. This is achieved by offloading the computation-intensive modules to the edge. Thus, Edge-SLAM reduces resource usage on the mobile device and keeps it constant. Edge-SLAM is implemented on top of ORB-SLAM2 and is publicly available on GitHub.
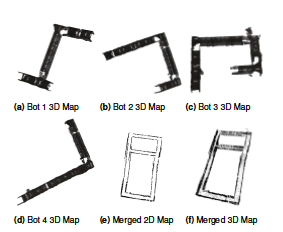
Use wireless access points and a modified ICP algorithm to efficiently merge visual 2D and 3D maps of indoor environments from multiple robots. Received signal strength values from multiple Access Points are used to find a coarse transformation between the robots.
A new algorithm for coverage path planning (CPP) problem for unmanned aerial vehicles (UAV), based on minimizing total energy consumed during flight.
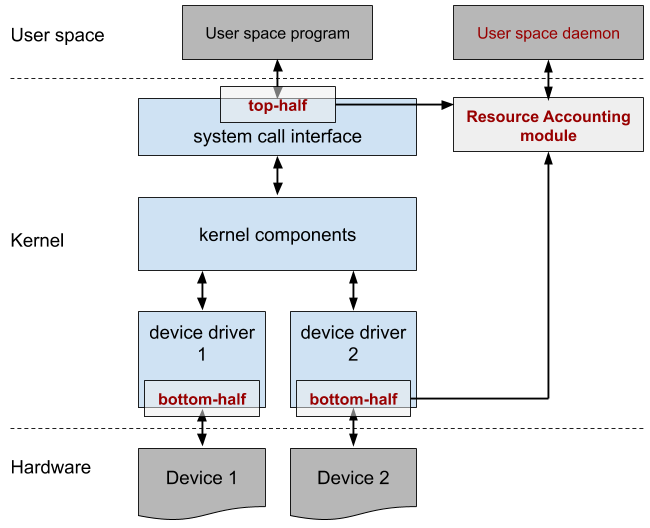
A new mechanism to accurately account for the asynchronous energy usage of resources in mobile systems and IoT devices. By accurately relating the application requests with kernel requests to device and corresponding device responses, we can accurately attribute time of use to the requesting process.
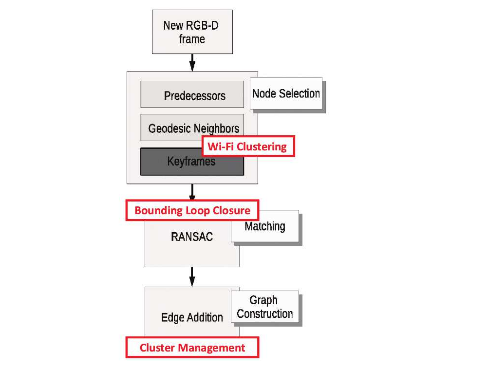
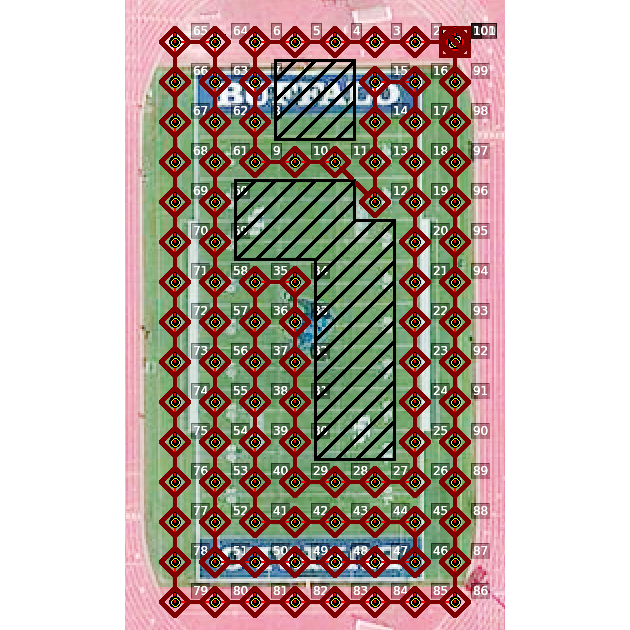
Utilize Wi-Fi received signal strength to improve loop closures in visual SLAM systems in repetitive indoor environments with perceptual aliasing. This project proposes a generic way integrate Wi-Fi sensing into visual SLAM algorithms improving the accuracy of visual SLAM algorithms by 11% and reducing computation time by 15% to 25%.
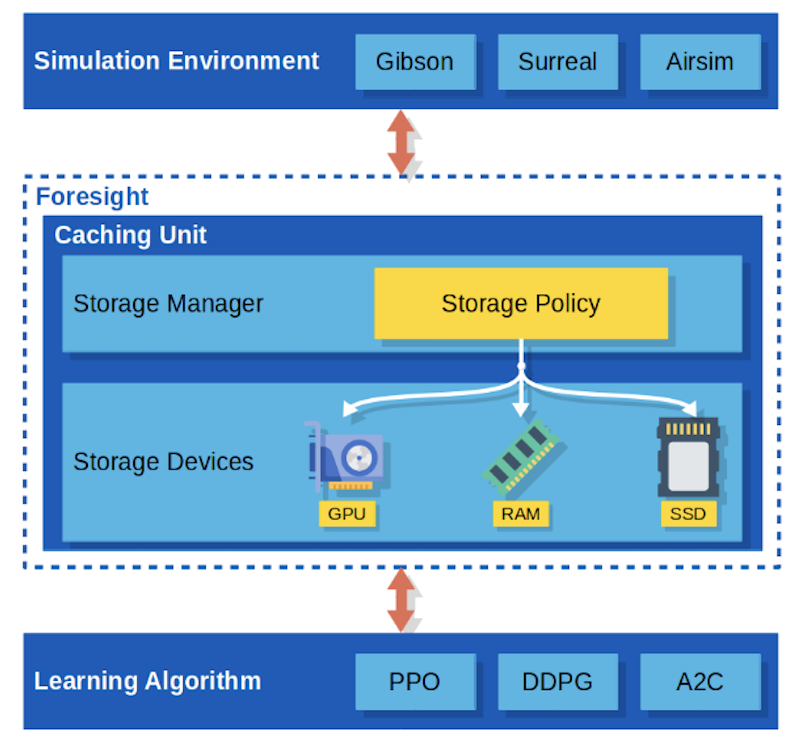
A new algorithm for speeding up perception in learning algorithms. Caching is used to associate previously-encountered percepts with actions beneficial to the agent’s overall performance. This work has been shown to significantly decrease training times while maintaining the same level of performance. Foresight is generalizable to any simulation environment.