Edge-SLAM
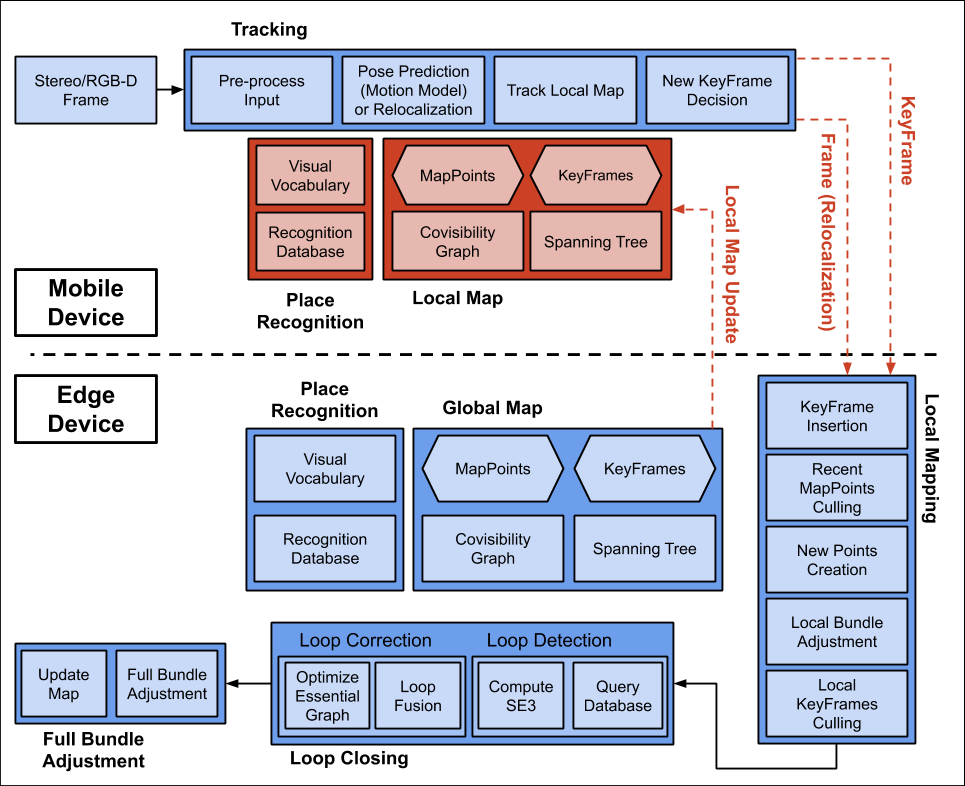
Edge-SLAM is an edge-assisted visual simultaneous localization and mapping. Edge-SLAM adapts Visual-SLAM into edge computing architecture to enable long operation of Visual-SLAM on mobile devices. This is achieved by offloading the computation-intensive modules to the edge. Thus, Edge-SLAM reduces resource usage on the mobile device and keeps it constant. Edge-SLAM is implemented on top of ORB-SLAM2 and is publicly available on GitHub.
Links
[GitHub Repository] [Presentation Video] [Presentation Slides] [Demonstration Abstract] [Demonstration Elevator Pitch Video] [Demonstration Full Video]Contributors



Publications
-
Edge-SLAM: Edge-Assisted Visual Simultaneous Localization and Mapping
Ali J. Ben Ali , Zakieh Hashemifar , Karthik Dantu
Proceedings of the 18th International Conference on Mobile Systems, Applications, and Services, 2020 , pp. 325–337
Project Page | PDF| Bibtex